Данная статья описывает опыт установки на принтер Creality3D Ender-3 материнской платы BIG TREE TECH (BIQU) SKR v1.3 с драйверами Trinamic TMC2208 в режиме управления по UART с последующей настройкой и прошивкой Marlin 2.x bugfix.
Приведенные здесь инструкции также применимы для Ender-3 Pro.
Зачем вообще это надо?
Плата BIG TREE TECH (BIQU) SKR v1.3 оснащена 32-битным микропроцессором LPC1768 на ядре ARM Cortex-M3. Данный микропроцессор обладает на порядок более внушительными вычислительными возможностями, чем ATmega1284P, установленный на штатной плате Creality 1.1.x, которой оснащаются принтеры серии Ender. Это дает возможность одновременно задействовать нагружающие микропроцессор и занимающие много памяти функции, такие как использование Linear Advance, автоуровня типа BLTouch/3DTouch, плавных ускорений S Curve Acceleration и др. Кроме того, в целом повышается быстродействие системы и максимально достижимая скорость печати.
Помимо этого, плата BIG TREE TECH (BIQU) SKR v1.3 имеет еще несколько важных преимуществ:
Колодки для драйверов в форм-факторе Polulu (SilentStepStick) - возможность установить любые поддерживаемые прошивкой драйвера без необходимости перепайки и колхозинка штатной платы
Возможность установки до 5 драйверов и 2 нагревателей хотенда - можно установить дополнительный экструдер, toolchange-систему, MMU-ситему, использовать выход на второй нагреватель как дополнительный управляемый PWM-выход (подсветка/охлаждение)
Наличие предохранителей на плате - меньше вероятность спалить мосфет стола или хотенда при случайном замыкании
Возможность подключить цветной (сенсорный) дисплей, наличие дополнительных AUX портов
Разводка под управление драйверами по UART и SPI «из коробки»
Для управления шаговыми двигателями (ШД) было решено использовать драйвера Trinamic TMC2208. Это относительно новые драйвера, пришедшие на смену хорошо зарекомендовавшему себя поколению TMC21XX. К их преимуществам можно отнести:
Технология StealthChop2 – тишина работы моторов
Технология SpreadCycle – оригинальный алгоритм direct current управления от Trinamic, позволяет точно управлять током в обмотках ШД для увеличения точности позиционирования и момента на высоких скоростях
Возможность работы в режиме нативного дробления до 1/256 шага или с меньшим дроблением, но с интерполяцией до 1/256.
Возможность управления по UART
На последнем пункте остановимся подробнее. В данной статье рассматривается именно способ установки драйверов c управлением по UART. Это позволяет из прошивки конфигурировать ток, дробление шага, интерполяцию, режим чоппера и другие параметры работы драйвера. Кроме того, в прошивке Marlin (и, возможно, в других) реализован так называемый гибридный режим, суть которого в автоматическом переключении драйвера из тихого режима StealthChop2 в более «мощный» SpreadCycle при достижении определенной скорости (hybrid mode threshold). Это позволяет «поддать жару», когда это нужно, наслаждаясь тишиной в остальное время. Помимо этого, используя управление по UART, можно настроить фазы чоппера SpeadCycle для достижения меньшего уровня шума в этом режиме (я пока этого не делал и это тема для отдельной статьи).
Что нам понадобится
Принтер Creality3D Ender-3 (Ваш К.О.)
Плата BIG TREE TECH (BIQU) SKR v1.3
Драйвера Trinamic TMC2208 v2.1
Паяльник
Набор шестигранных ключей
Надстройка PlatformIO для IDE VS Code
Прошивка Marlin версии bugfix-2.0.x (самая свежая)
Вольтметр
Мелкая отвертка под плоский шлиц (лучше диэлектрическая)
ПАААААЕХАЛИ!
Электроника
Расположение потенциометров Vref на стандартной платеСхема подключения проводов и установки джамперов на плате SKR 1.3 (разъемы ШД находятся за драйверами и не отмечены) в дефолтной конфигурации Ender-3 с одним экструдером. Щелкните, чтобы посмотреть в полном размере.
Важно: считаем ток ШД!
Насколько я успел заметить, на принтеры Creality3D устанавливается широкий спектр ШД, отличающихся своими характеристиками, в первую очередь – максимальным током обмоток. Некоторые моторы практически невозможно «нагуглить» по маркировке и узнать требуемый им ток. Поэтому для того, чтобы действовать наверняка, я советую перед заменой платы выяснить, какой ток установлен для Ваших конкретных ШД.
На дефолтной плате Creality 1.1.x установлено 4 драйвера A4988, распаянных непосредственно на плате. Рядом с каждым драйвером установлен потенциометр (turnpot), который задает опорное напряжение Vref.
Отключите от платы провода ШД. Включите питание. Аккуратно измерьте напряжение между центром «крутилки» потенциометра и землей (за землю можно взять черный провод, приходящий в винтовую колодку на плате с блока питания) для каждого из драйверов, запишите.
Теперь посчитаем ток, который нужно установить для наших конкретных ШД на новых драйверах. Дело в том, что Vref для драйвера A4988 задает максимальный ток Imax, в то время как для TMC2208 мы задаем среднеквадратичное значение тока Irms ~ Imax/1.414
Это и есть нужное нам значение тока новых драйверов. При управлении по UART данного расчета достаточно. Тем, кто не хочет управлять по UART, то есть устанавливает драйвера в standalone-режиме, необходимо посчитать Vref для TMC2208 по следующей формуле:
Vref(TMC2208) = (Irms(TMC2208)*2.5) / 1.77
Указанная выше формула справедлива только для наиболее распространенных вариантов исполнения драйверов TMC2208 с референсным резистором Rsense = 0.11 Ом.
Внимание! Настройка (и измерение) Vref должна производиться с отключенными проводами ШД, но подключенным основным питанием платы.
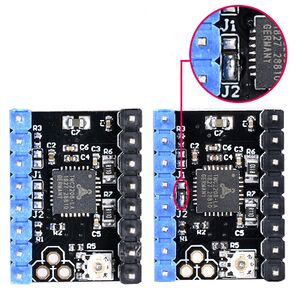
Перымычка, которую нужно запаять на драйвере для управления по UART. Также указаны резисторы Rsense - проверьте их номинал.
Подготовка драйверов
Для того, чтобы использовать UART для управления драйверами, необходимо аккуратно запаять на них перемычку, как показано на рисунке (здесь и далее показаны драйвера от BIGTREETECH версии 2.1, но для драйверов от других производителей, например Fysetc, действия будут аналогичными)
Переделка дефолтных двухконтактных разъемов концевиков в трехконтактные под SKR
Замена платы
Отключаем питание принтера. Снимаем крышку с корпуса электроники, отключаем вентилятор охлаждения от платы. Аккуратно удаляем термоклей со всех разъемов, отключаем все провода от платы. Не забываем пометить удобным способом провода, на которых нет заводских меток.
Откручиваем плату от корпуса электроники, откручиваем корпус электроники от рамы принтера (один из винтов находится снизу, под принтером).
Для подключения родных двухконтактных разъемов концевиков в трехконтактные разъемы на плате SKR нужно модифицировать провода одним из способов (чтобы провода подключались к двум нижним пинам разъема, см. рисунок):
«Переобуваем» провод в трехпиновый корпус – самый лучший вариант, если есть такие корпуса
Подрезаем один из двух ключевых выступов корпуса разъема на проводе так, чтобы он правильно вошел в разъем на плате
Убираем с платы все джамперы, кроме 5 (6, если у нас 2 хотенда) – по 1 возле 4 драйверов на красных площадках (включает управление по UART) и еще 1 на красной площадке в центре платы, отвечающий за режим питания контроллера – от USB или от внешнего БП. Устанавливаем драйвера (см. рисунок, если поставить вверх ногами – дровам кирдык). Хотя сама плата запускается от 5 В по USB, драйвера не будут работать без подключенного основного питания 24 В, и на дисплее будет отображаться TMC connection error.
Теперь подключаем все провода в соответствующие разъемы платы (внимание на полярность!), для этого может потребоваться немного распотрошить жгут проводов. Вентилятор обдува детали подключаем в разъем FAN, вентилятор охлаждения электроники – в разъем 12/24 V (в самом углу платы, возле разъема ШД оси X), вентилятор охлаждения радиатора печатной головы – в разъем нагревателя второго хотенда HT1 (винтовая колодка) если у нас только 1 хотенд, иначе параллельно вентилятору охлаждения электроники. Экран подключаем в разъем EXP1, провода концевиков – в трехпиновые разъемы Xmin, Ymin, Zmin на плате, остальное подключается очевидным образом.
Прошивка
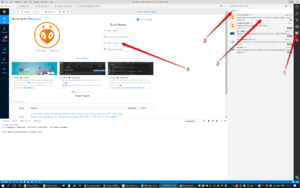
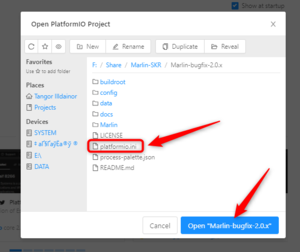
Установка PlatformIO в VS CodeОткрыть проект Marlin в PlatformIO
Дисклеймер
Данный раздел предполагает, что Вы знаете, как конфигурировать прошивку Marlin. Здесь будут описаны только специфические настройки для платы SKR 1.3 и драйверов TMC2208 с управлением по UART, а также несколько других полезных твиков. Если Вы не знаете как конфигурируется прошивка, как устанавливаются размеры области печати, шаги по осям, ускорения и прочие основные параметры принтера – для начала обязательно изучите эту информацию, например по видео Дмитрия Соркина, и только после этого продолжайте.
В качестве отправной точки крайне советую использовать конфигурационные файлы для Ender-3 из папки с примерами, это избавит от необходимости конфигурирования концевиков, направлений моторов, зоны печати и прочих важных вещей – там это уже сделано. Здесь эти настройки рассматриваться не будут.
Установка PlatformIO IDE
Качаем последнюю версию Marlin bugfix-2.0.x. Качаем VS Code. Запускаем VS Code, заходим в Extensions, вводим в строку поиска platformio, жмем зеленую кнопку Install возле расширения PlatformIO IDE, ждем завершения установки расширения, перезапускаем VS Code. На появившейся странице PIO Home жмем кнопку Open Project, заходим в папку с прошивкой (в ней должен быть файл platformio.ini), жмем Open.
Конфигурация
Нам нужно будет внести изменения в 3 файла: platformio.ini, configuration.h и configuration_adv.h.
Начнем по порядку. Настоятельно советую пользоваться поиском Ctrl+F для быстрого перехода к нужным настройкам.
platformio.ini
Указываем в разделе [platformio] микроконтроллер, для которого будем компилировать прошивку.
env_default = LPC1768
configuration.h
Настраиваем последовательные порты:
#define SERIAL_PORT -1
#define SERIAL_PORT_2 0
Ускоряем немного обмен данными через последовательный порт
#define THERMAL_PROTECTION_HOTENDS // Enable thermal protection for all extruders
#define THERMAL_PROTECTION_BED // Enable thermal protection for the heated bed
#define THERMAL_PROTECTION_CHAMBER // Enable thermal protection for the heated chamber
Указываем, какие у нас установлены драйвера ШД
#define X_DRIVER_TYPE TMC2208
#define Y_DRIVER_TYPE TMC2208
#define Z_DRIVER_TYPE TMC2208
#define E0_DRIVER_TYPE TMC2208
#define E1_DRIVER_TYPE TMC2208 // разумеется, если есть второй экструдер
Если устанавливаем драйвера без управления по UART, то вместо TMC2208 пишем TMC2208_STANDALONE
Можем включить более плавные ускорения, при желании
#define S_CURVE_ACCELERATION
Проверяем направление мотора экструдера. Если редукторный фидер, пишем false, если безредукторный, то true
#define INVERT_E0_DIR true
Можем настроить пункт меню для калибровки стола – Level corners, печатная коловка будет поочередно перемещаться в каждый из 4 углов (в положение над регулировочным винтом) и в центр стола (здесь параметры для калибровки по эталону 0.1 мм, толщину эталона можно задать параметром LEVEL_CORNERS_HEIGHT)
#define LEVEL_BED_CORNERS
#if ENABLED(LEVEL_BED_CORNERS)
#define LEVEL_CORNERS_INSET 35 // (mm) An inset for corner leveling
#define LEVEL_CORNERS_Z_HOP 5 // (mm) Move nozzle up before moving between corners
#define LEVEL_CORNERS_HEIGHT 0.1 // (mm) Z height of nozzle at leveling points
#define LEVEL_CENTER_TOO // Move to the center after the last corner
#endif
Настраиваем более адекватные скорости хоуминга
#define HOMING_FEEDRATE_XY (30*60)
#define HOMING_FEEDRATE_Z (4*60) // Если используется датчик автоуровня типа BLTouch/3DTouch, можно увеличить значение до (10*60) для ускорения автокалибровки
Выбираем язык меню
#define LCD_LANGUAGE en
Проверяем поддержку карты памяти
#define SDSUPPORT
Включаем «пищалку», чтобы она могла нас уведомлять о важных вещах типа перегрева, но выключаем звук в меню
Включаем прокрутку длинных статусных сообщений на экране
#define STATUS_MESSAGE_SCROLLING
Увеличиваем задержку (в миллисекундах) перед автоматическим выходом из меню на главный экран (беситбеситбеситбесит)
#define LCD_TIMEOUT_TO_STATUS 60000
«Чиним» прогресс-бар при печати через USB
#define LCD_SET_PROGRESS_MANUALLY
Опционально включаем подтверждение при выборе файла с флешки для печати
#define SD_MENU_CONFIRM_START
Включаем поддержку отправки длинных имен файлов с флешки на хост по USB
#define LONG_FILENAME_HOST_SUPPORT
Включаем прокрутку длинных имен файлов на флешке в меню
#define SCROLL_LONG_FILENAMES
Настраиваем SD карту
#ifdef TARGET_LPC1768
//#define LPC_SD_LCD // Use the SD drive in the external LCD controller.
#define LPC_SD_ONBOARD // Use the SD drive on the control board. (No SD_DETECT_PIN. M21 to init.)
//#define LPC_SD_CUSTOM_CABLE // Use a custom cable to access the SD (as defined in a pins file).
//#define USB_SD_DISABLED // Disable SD Card access over USB (for security).
#if ENABLED(LPC_SD_ONBOARD)
//#define USB_SD_ONBOARD // Данную опцию можно включить, чтоб видеть флешку с хоста, как через кард-ридер, но я не проверял
#endif
#endif
Включаем babystepping - возможность вручную задавать точно оффсет оси Z во время печати из меню принтера, например, если мы видим, что с первым слоем что-то не так
#define BABYSTEPPING
#if ENABLED(BABYSTEPPING)
//#define BABYSTEP_WITHOUT_HOMING
//#define BABYSTEP_XY // Also enable X/Y Babystepping. Not supported on DELTA!
#define BABYSTEP_INVERT_Z false // Change if Z babysteps should go the other way
#define BABYSTEP_MULTIPLICATOR 2 // Babysteps are very small. Increase for faster motion.
#define DOUBLECLICK_FOR_Z_BABYSTEPPING // Double-click on the Status Screen for Z Babystepping.
#if ENABLED(DOUBLECLICK_FOR_Z_BABYSTEPPING)
#define DOUBLECLICK_MAX_INTERVAL 1250 // Maximum interval between clicks, in milliseconds.
// Note: Extra time may be added to mitigate controller latency.
//#define BABYSTEP_ALWAYS_AVAILABLE // Allow babystepping at all times (not just during movement).
#define MOVE_Z_WHEN_IDLE // Jump to the move Z menu on doubleclick when printer is idle.
#if ENABLED(MOVE_Z_WHEN_IDLE)
#define MOVE_Z_IDLE_MULTIPLICATOR 1 // Multiply 1mm by this factor for the move step size.
#endif
#endif
При желании включаем LA
#define LIN_ADVANCE
#if ENABLED(LIN_ADVANCE)
//#define EXTRA_LIN_ADVANCE_K // Enable for second linear advance constants
#define LIN_ADVANCE_K 0.0 // Unit: mm compression per 1mm/s extruder speed
//#define LA_DEBUG // If enabled, this will generate debug information output over USB.
#endif
Уменьшаем размер минимальной отрабатываемой группы шагов
#define MIN_STEPS_PER_SEGMENT 1
Если у нас возникает проблема с мотором E, можно попробовать увеличить это значение, но в последних версия прошивки данная проблема должна быть решена
#define MINIMUM_STEPPER_PULSE 0 // можно попробовать 2 или 4
Включаем Emergency Parser, чтобы иметь возможность остановить принтер мгновенно, а не ждать, пока выполнятся все команды из буфера
#define EMERGENCY_PARSER
Наконец, переходим к собственно настройке драйверов!
Настраиваем токи и дробление шага. Здесь каждый пусть решает сам, какое дробление использовать, включать ли интерполяцию - спорить можно бесконечно.
#if HAS_TRINAMIC
#define HOLD_MULTIPLIER 0.6 // Множитель тока в режиме удержания ШД
#define INTERPOLATE false // Включает или выключает интерполяцию по ВСЕМ осям
#if AXIS_IS_TMC(X)
#define X_CURRENT 600 // сюда пишем наш ток Irms, который мы посчитали ранее
#define X_MICROSTEPS 8 // количество микрошагов, поддерживается нативно до 256, не забываем изменить число шагов на мм
#define X_RSENSE 0.11 // Если на Ваших драйверах резистор Rsense отличается от стандартного R110, сюда вписываем номинал
#endif
#if AXIS_IS_TMC(Y)
#define Y_CURRENT 600
#define Y_MICROSTEPS 8
#define Y_RSENSE 0.11
#endif
#if AXIS_IS_TMC(Z)
#define Z_CURRENT 600
#define Z_MICROSTEPS 4
#define Z_RSENSE 0.11
#endif
#if AXIS_IS_TMC(E0)
#define E0_CURRENT 800
#define E0_MICROSTEPS 4
#define E0_RSENSE 0.11
#endif
#if AXIS_IS_TMC(E1)
#define E1_CURRENT 800
#define E1_MICROSTEPS 4
#define E1_RSENSE 0.11
#endif
Включаем тихий режим StealthChop (на оси экструдера, особенно с редукторным фидером, стабильнее работает SpreadCycle, по моим ощущениям)
В данной секции можно задать отдельно любые параметры для каждого из драйверов, например выборочно выключить интерполяцию на Z и E, если выше она включена для всех осей, но перед тем, как что-то здесь писать, советую разобраться с функциями библиотеки TMCStepper. В противном случае оставляйте эту секцию пустой, чтобы ничего не сломать.
Включаем расширенный отчет о возможностях прошивки для USB хоста
#define EXTENDED_CAPABILITIES_REPORT
Выключаем экструзию по объему
#define NO_VOLUMETRICS
Хоба!
Компиляция и прошивка платы
После того, как прошивка сконфигурирована, сохраняем изменения. Жмем Ctrl+Alt+B - запустится процесс компиляции прошивки. Если ошибок нет, после его завершения в терминале VS Code напротив LPC1768 будет зеленая надпись SUCCESS. В папке Marlin-bugfix-2.0.x\.pioenvs\LPC1768 появится файл firmware.bin - это и есть скомпилированная прошивка. Копируем этот файл на SD-карту и вставляем в плату, после чего перезапускаем плату - загрузчик установит прошивку и вы увидите стартовый экран Marlin (не беспокойтесь, после перезагрузки файл прошивки на флешке будет переименован, его не нужно удалять вручную, плата не будет перепрошиваться при каждой перезагрузке, пока Вы не кинете новый файл прошивки на флешку). Не забываем после перепрошивки инициализировать EEPROM.
Поздравляем - Вы восхитительны!
Что дальше?
Что же (а главное - как) мы можем настроить благодаря подключению по UART?
Меню TMC drivers
В меню Configuration -> Advanced configuration появилось новое подменю - TMC drivers, содержащее 3 пункта:
Driver current - настройка тока Irms для каждого драйвера
Hybrid threshold - настройка порога гибридного режима, то есть скорости движения оси, после которой драйвер будет переключаться из режима StealthChop в SpreadCycle. Если хотите выключить гибридный режим для какой-то из осей и использовать только StealthChop, поставьте здесь очень большое значение (на 22 мая 2019 существует баг - при загрузке настроек из EEPROM все значения отображаются равными 0. При этом на самом деле загружаются правильные значения, их даже можно поменять в этом меню и сохранить в EEPROM, и все работает, но в самом меню отображается 0)
Microstepping mode - ручное переключение между StealthChop и SpreadCycle для кождой оси. Если стоит "on", то используется StealthChop и гибридный режим, если "off" - то всегда включен только SpreadCycle
Команды G-code
Ниже приводятся команды G-code для работы с драйверами TMC2208
M122 - вывод отладочной информации о состоянии драйверов - установленный ток, дробление шага и интерполяция, состояние регистров, состояние защиты от перегрева и прочие полезности
M569 - ручное переключение между StealthChop и SpreadCycle для кождой оси
M913 - настройка порога гибридного режима, то есть скорости движения оси, после которой драйвер будет переключаться из режима StealthChop в SpreadCycle